
Parametric
for Peanut
A parametric design experiment to create a custom slow feeder for my speed-eating dog, Peanut.

Parametric
for Peanut
A parametric design experiment to create a custom slow feeder for my speed-eating dog, Peanut.
Parametric
for Peanut
A parametric design experiment to create a custom slow feeder for my speed-eating dog, Peanut.
Why customize a bowl?
How might computational design support more adaptive, inclusive solutions for overlooked needs?
How might computational design support more adaptive, inclusive solutions for overlooked needs?
How might computational design support more adaptive, inclusive solutions for overlooked needs?
Slow feeders are everywhere, but few are designed for dogs as small as Peanut, my 4lb teacup poodle. Most are either too large or not restrictive enough to actually slow her down. I began wondering: What if a feeder could be tailored to an animal's specific size, behavior, or feeding style? What other needs might we be ignoring by defaulting to a one-size-fits-all?
Slow feeders are everywhere, but few are designed for dogs as small as Peanut, my 4lb teacup poodle. Most are either too large or not restrictive enough to actually slow her down. I began wondering: What if a feeder could be tailored to an animal's specific size, behavior, or feeding style? What other needs might we be ignoring by defaulting to a one-size-fits-all?
Slow feeders are everywhere, but few are designed for dogs as small as Peanut, my 4lb teacup poodle. Most are either too large or not restrictive enough to actually slow her down. I began wondering: What if a feeder could be tailored to an animal's specific size, behavior, or feeding style? What other needs might we be ignoring by defaulting to a one-size-fits-all?

Peanut, the speed-eating poodle.
Prototyping parametrics.
Using Rhino and Grasshopper, I developed a parametric model that allowed for customization of bowl width, depth, and ridge complexity. Adjustable sliders controlled angle, height, and spacing of ridges, enabling the feeder to scale based on a dog’s needs. After multiple iterations, I 3D printed a version specifically tailored to Peanut’s proportions and speed.
Using Rhino and Grasshopper, I developed a parametric model that allowed for customization of bowl width, depth, and ridge complexity. Adjustable sliders controlled angle, height, and spacing of ridges, enabling the feeder to scale based on a dog’s needs. After multiple iterations, I 3D printed a version specifically tailored to Peanut’s proportions and speed.
Using Rhino and Grasshopper, I developed a parametric model that allowed for customization of bowl width, depth, and ridge complexity. Adjustable sliders controlled angle, height, and spacing of ridges, enabling the feeder to scale based on a dog’s needs. After multiple iterations, I 3D printed a version specifically tailored to Peanut’s proportions and speed.


Grasshopper definition for bowl size and slow-feeder intensity.


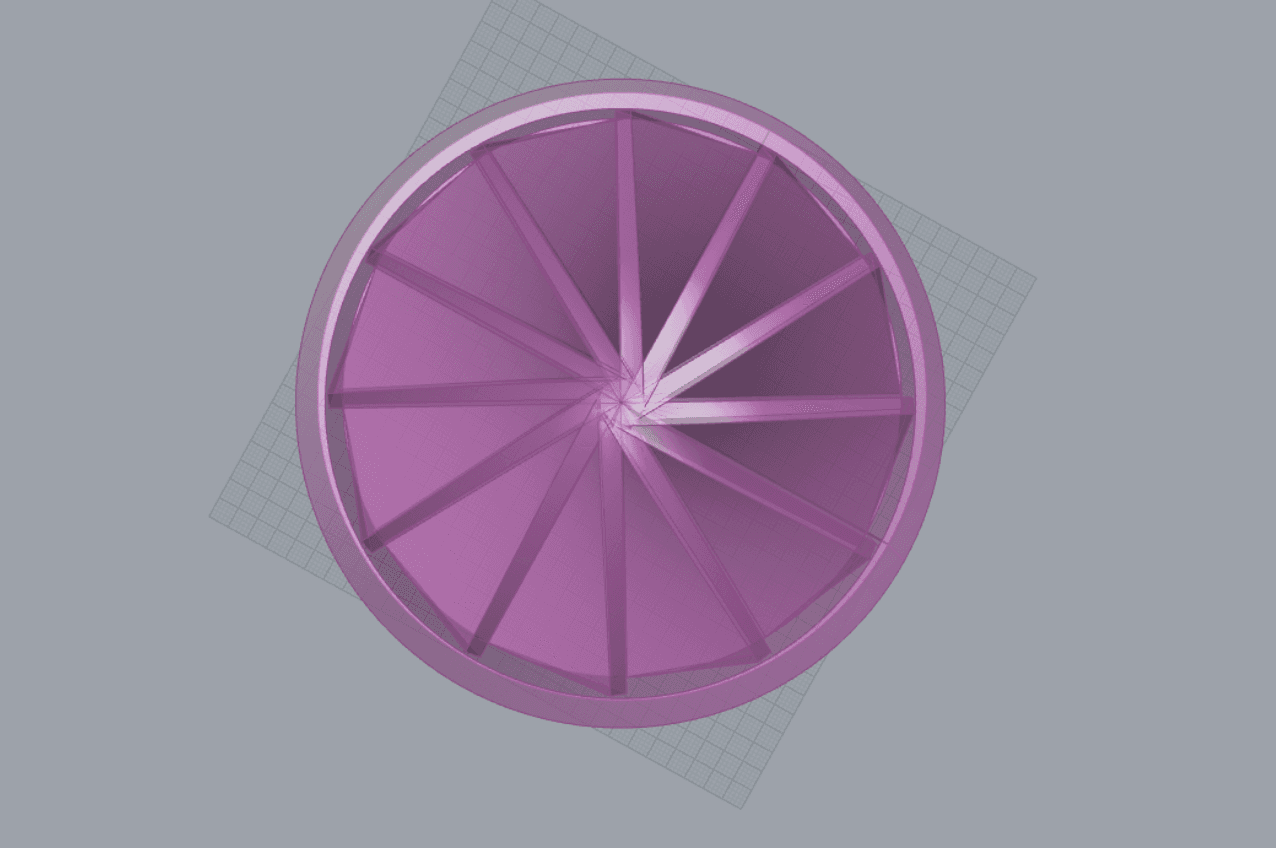
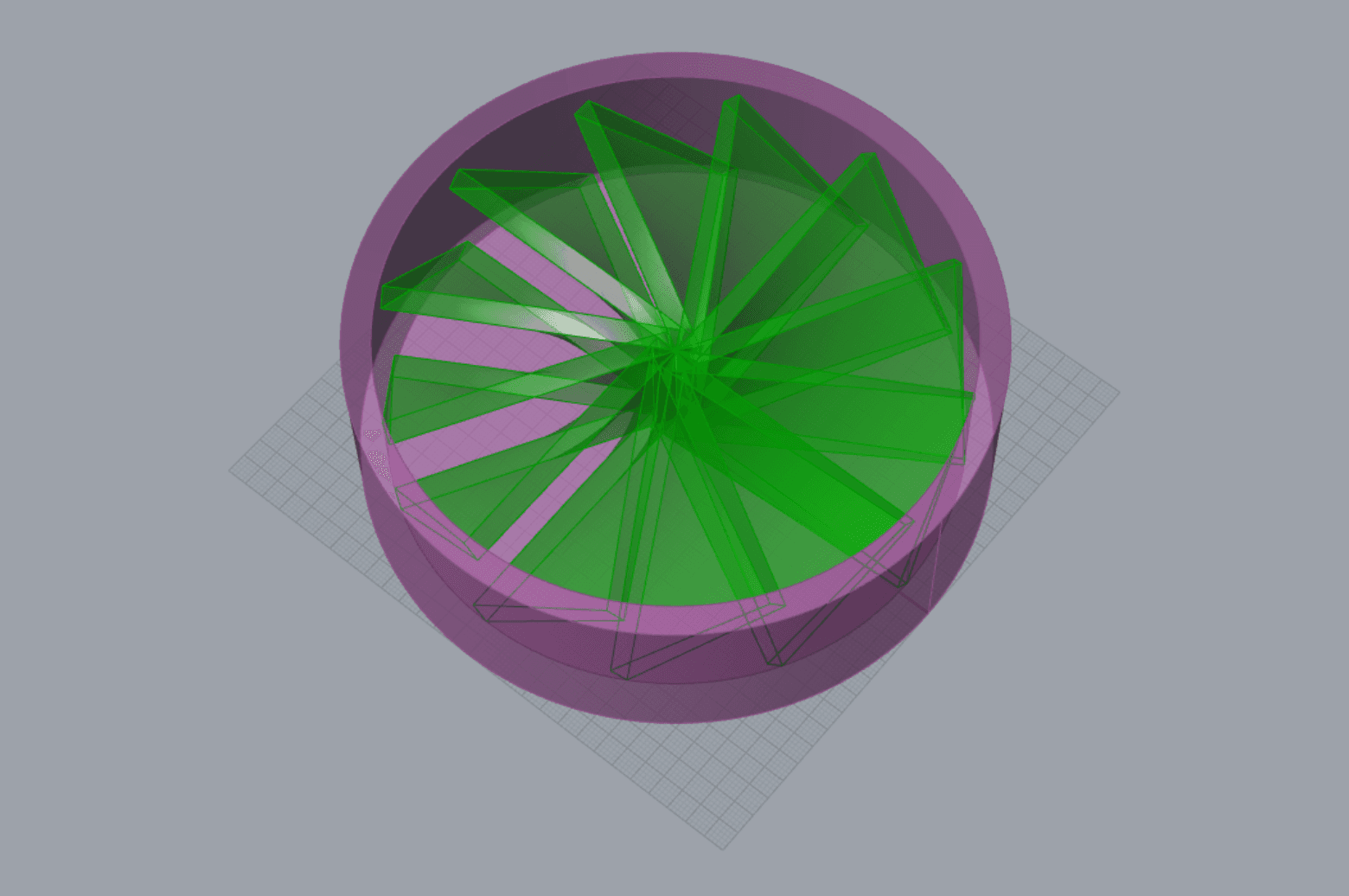
Parametric 3D models of low and high-intensity slow feeders, generated using Grasshopper.
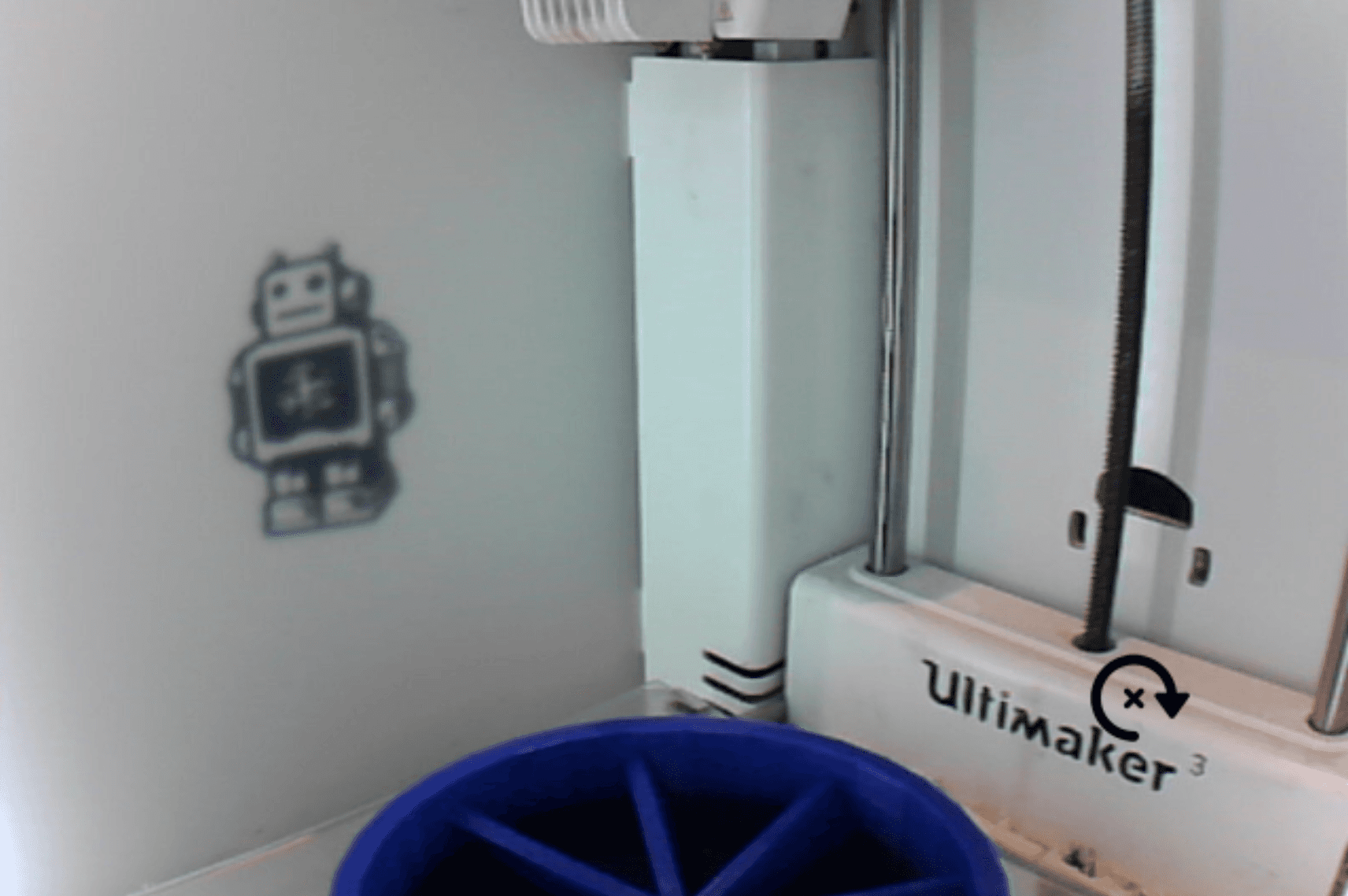
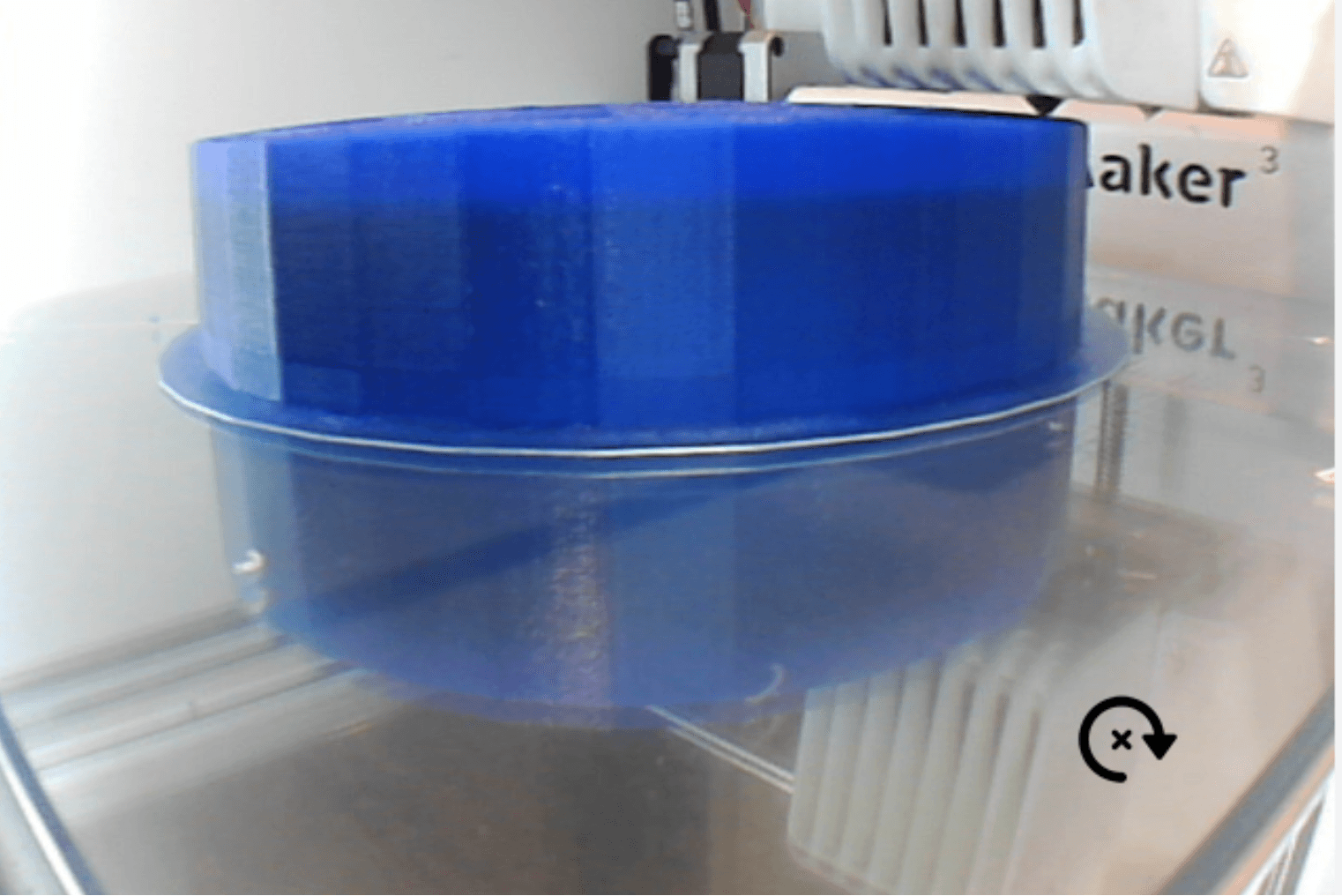
Slow feeder mid-print.
Reflection & future use.
The final prototype was a fully 3D-printed PLA slow feeder, customized for Peanut’s size and eating style. While I didn’t test it due to concerns around food-safe materials, the process raised valuable questions about inclusivity and personalization: What would it look like to design everyday tools that adapt to the bodies and behaviors they serve, whether human or non-human? How might parametric design challenge mass-production assumptions and open up more plural, responsive product systems?
The final prototype was a fully 3D-printed PLA slow feeder, customized for Peanut’s size and eating style. While I didn’t test it due to concerns around food-safe materials, the process raised valuable questions about inclusivity and personalization: What would it look like to design everyday tools that adapt to the bodies and behaviors they serve, whether human or non-human? How might parametric design challenge mass-production assumptions and open up more plural, responsive product systems?
The final prototype was a fully 3D-printed PLA slow feeder, customized for Peanut’s size and eating style. While I didn’t test it due to concerns around food-safe materials, the process raised valuable questions about inclusivity and personalization: What would it look like to design everyday tools that adapt to the bodies and behaviors they serve, whether human or non-human? How might parametric design challenge mass-production assumptions and open up more plural, responsive product systems?
A custom slow feeder for my little pup!
MADE WITH
Rhino, Grasshopper, 3D printing
TEAM
Shameemah Fuseini-Codjoe
(And Peanut!)