
Reimagining feedback.
Prototyping softness.

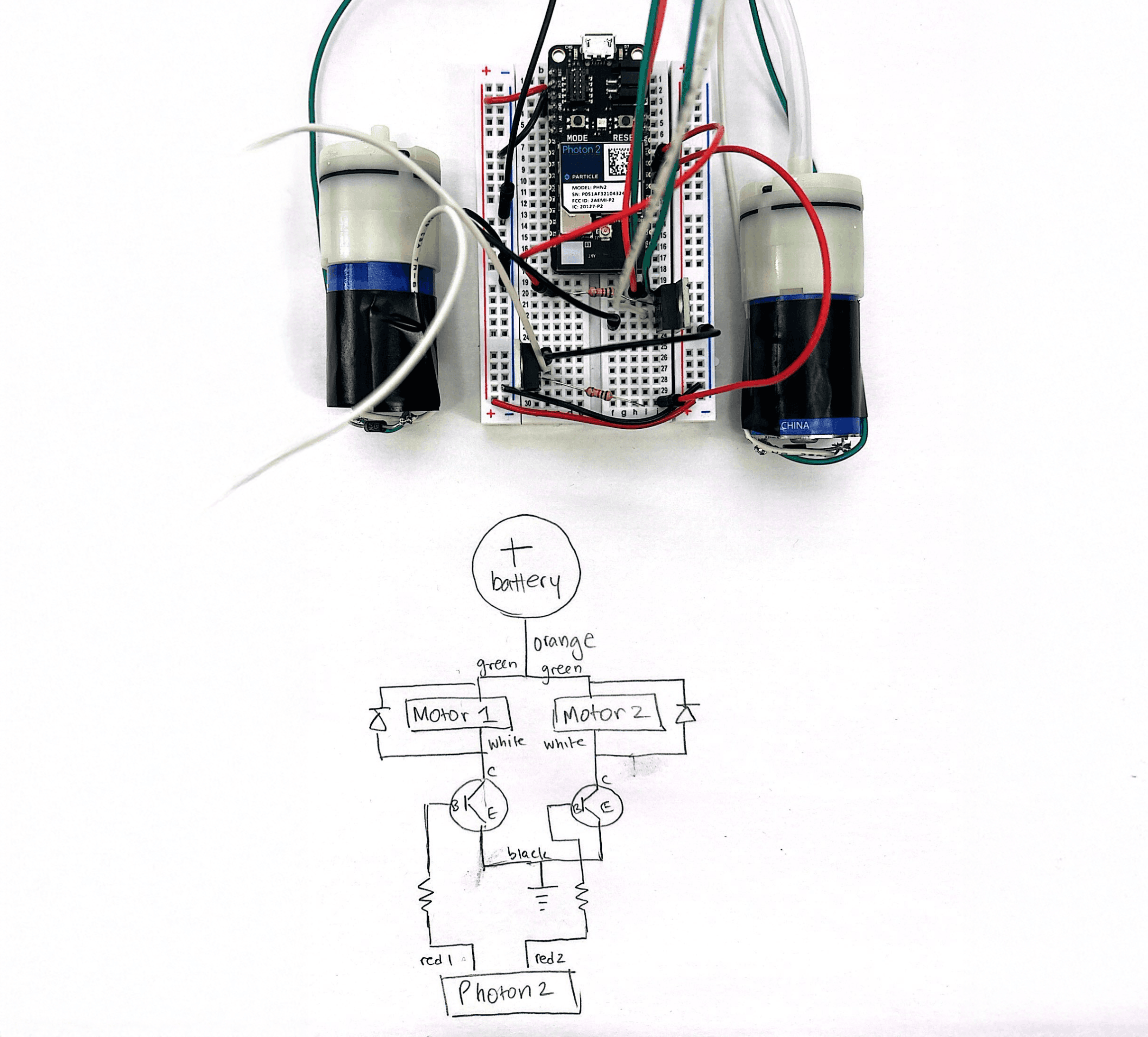
Early sketches and circuit logic.
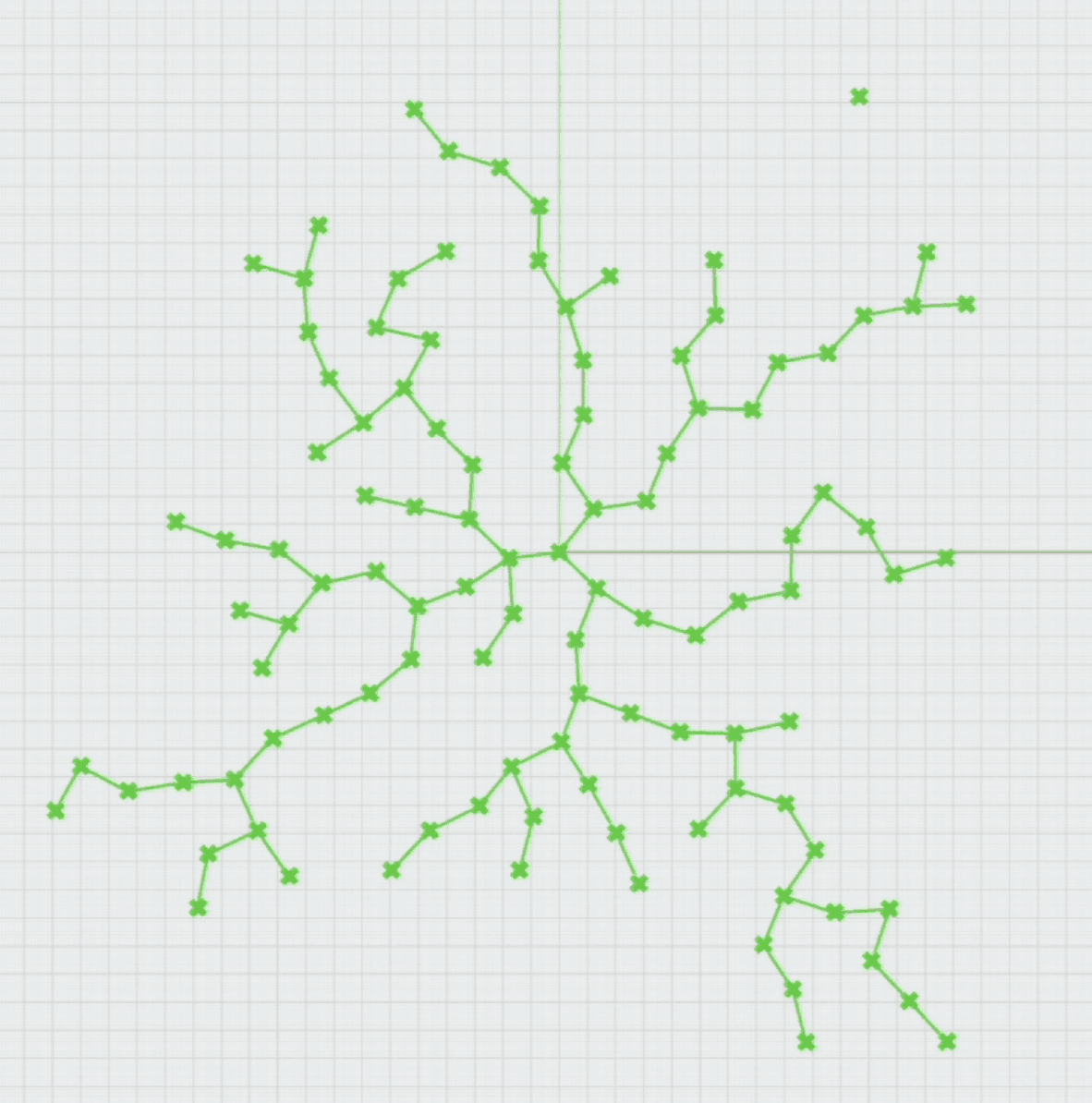
Grasshopper simulation using Kangaroo for reactive coral-like growth.


3D printed prototype: testing air channels and inflation responsiveness.
Near-final wearable form designed to rest gently on the collarbone.
Experiencing the boundary.

Final prototype in action: the wearable expands softly in response to proximity, signaling a need for space.
MADE WITH
Grasshopper, Arduino, 3D modeling, 3D printing, pneumatic pump, interaction prototyping
TEAM
Divya Srinivasan
Shameemah Fuseini-Codjoe